首页 > 极客资料 博客日记
不用PLC和板卡,一台电脑就可以控制伺服
2024-10-21 15:00:05极客资料围观17次
1、前言
大家好!我是付工。
EtherCAT是运动控制领域使用最广泛的总线通信协议之一。
如果我们只有一台电脑,能不能直接控制EtherCAT总线伺服呢?
这个是完全可以的。
我们可以在电脑上安装实时运行环境,从而实现对伺服电机的总线控制。如果大家手上也有一台EtherCAT总线伺服,就可以直接通过C#写几行代码,让伺服电机转动起来。
2、开发环境
当然,方法不止一种,比如倍福的Twincat。
我们主要使用C#编程,因此本文使用的是正运动的MotionRT7。
MotionRT7是正运动推出的跨平台运动控制实时内核,目前已经发展到第七个版本,也是国内首家完全自主自研,自主可控的Windows运动控制实时软核,可以让一台普通的电脑变成实时控制器,并且支持跨平台应用和多种语言的二次开发。

3、伺服接线
使用EtherCAT总线伺服,接线就非常简单了。只需要给伺服供电,然后伺服与电机之间接好编码器和动力线,再通过一根网线将PC电脑与伺服连接起来就可以了。

这里使用的是汇川SV660N总线伺服,其他品牌型号均支持,模组不是必须的。
4、驱动安装
首先,大家需要下载一个MotionRT7的资料包,公众号【上位机Guide】回复:MotionRT7下载之后,我们需要安装一下驱动,具体操作步骤如下:
1、点击我的电脑,右击选择【管理】,选择【设备管理器】,在右侧的设备列表中,任意选中一个。

2、选择菜单栏中的【操作】,在下拉菜单中选择【添加过时硬件】。

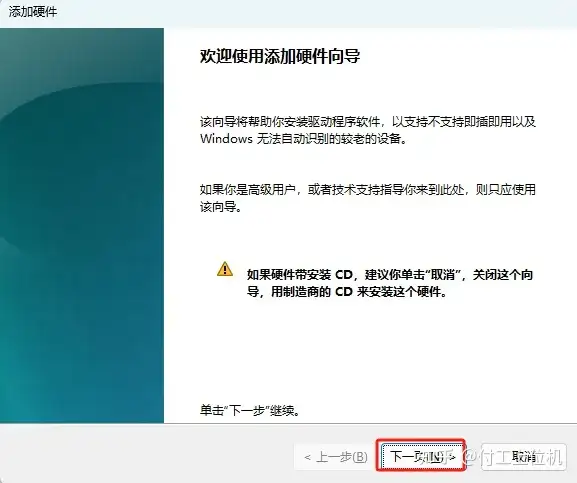
3、在弹出的窗体中,选择【下一页】。
4、在弹出的窗体中,选择【安装我手动从列表选择的硬件(高级)】,点击【下一页】。

5、选择显示所有设备,点击下一页。

6、选择从磁盘安装,点击下一页。

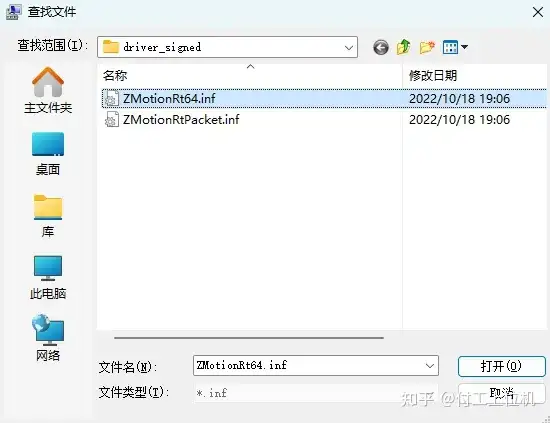
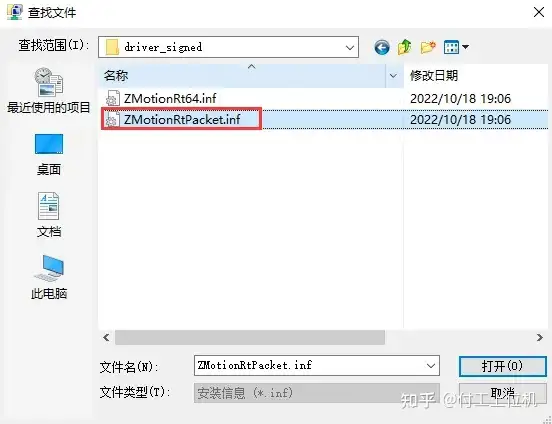
7、点击【浏览】,在前面下载的MotionRT7文件夹,找到rt1028_signed文件夹,再选择driver_signed文件夹,选择ZMotionRt64.inf,点击打开。
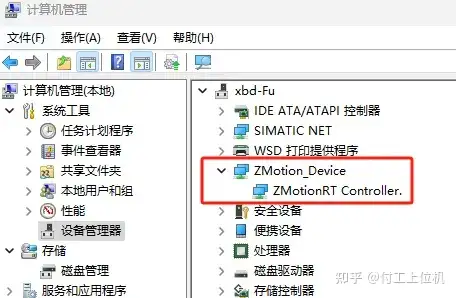
8、点击打开之后,回到从磁盘安装界面,点击确定,然后一直下一页即可,最终我们可以在设备管理器中,看到ZMotion_Device,下面有个ZMotionRT Controller,即说明控制器驱动安装完成。
5、网卡配置
安装驱动后,我们接下来对网卡进行相关配置。
1、通过控制面板找到网络连接,然后选择一个网卡,建议选择电脑自带的网卡,右击属性。

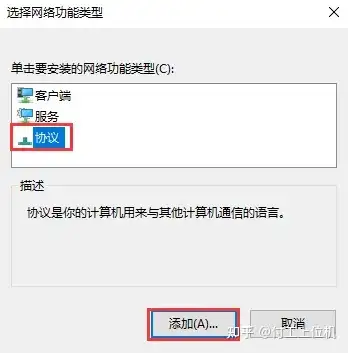
2、然后选择安装,在弹出窗体中,选择协议 => 添加。

3、选择从磁盘安装,点击确定。

4、浏览找到MotionRT7文件夹,找到rt1028_signed文件夹,再选择driver_signed文件夹,直到找到ZmotionRtPacket.inf文件,选择并点击打开。
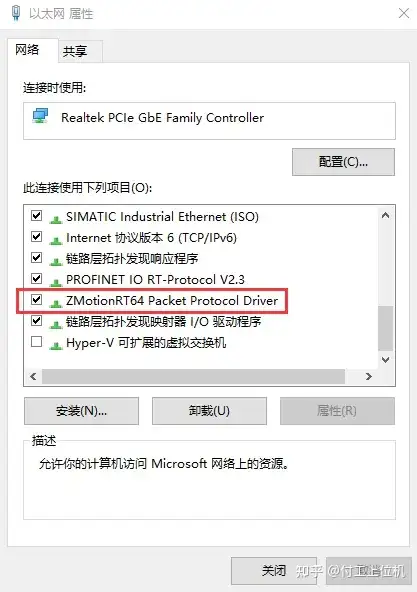
5、安装成功后,以太网属性中多了ZMotionRT64 Packet Protocol Driver,并且确定前面的勾选已经选上。
6、运行RT7
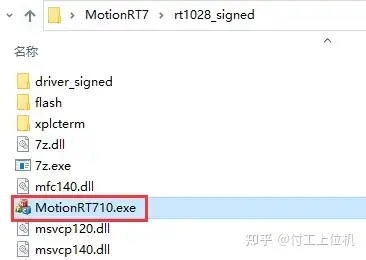
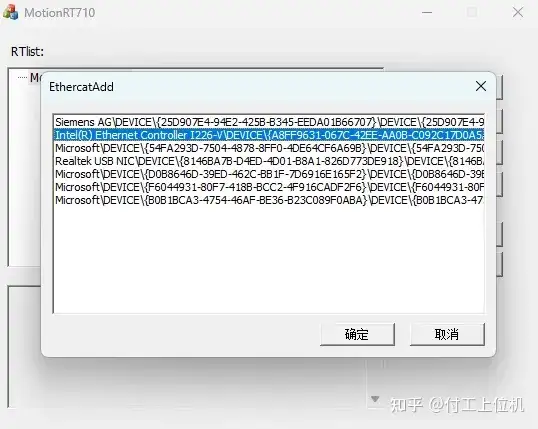
1、打开MotionRT7文件夹,找到MotionRT710.exe,双击打开。
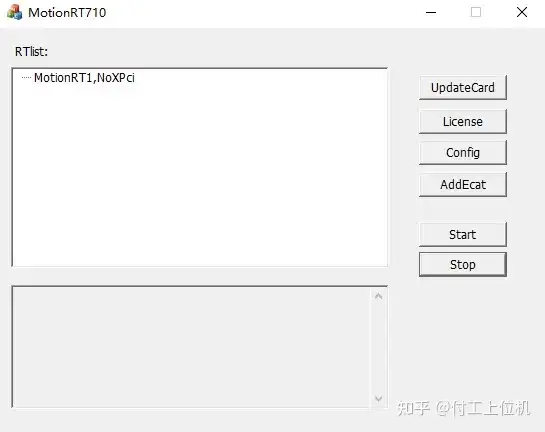
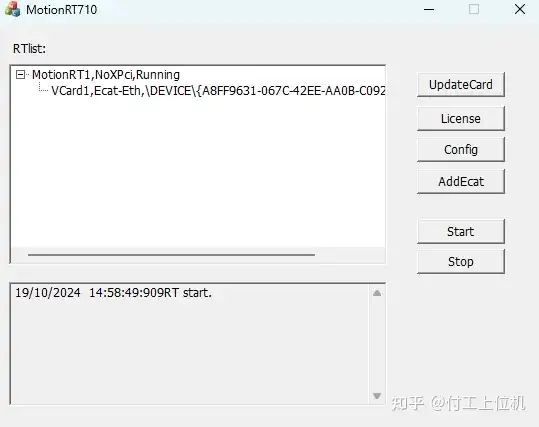
2、选择MotionRT1,NoXPci,选择AddEcat,选择我们刚刚配置的网卡,点击确定。
3、添加完成后,点击Start,有消息提示,说明Start成功。
4、这时候找到MotionRT7文件夹中的MotionRTDemo运行程序文件夹下的ZmotionECI2828Pro.exe,运行如下:
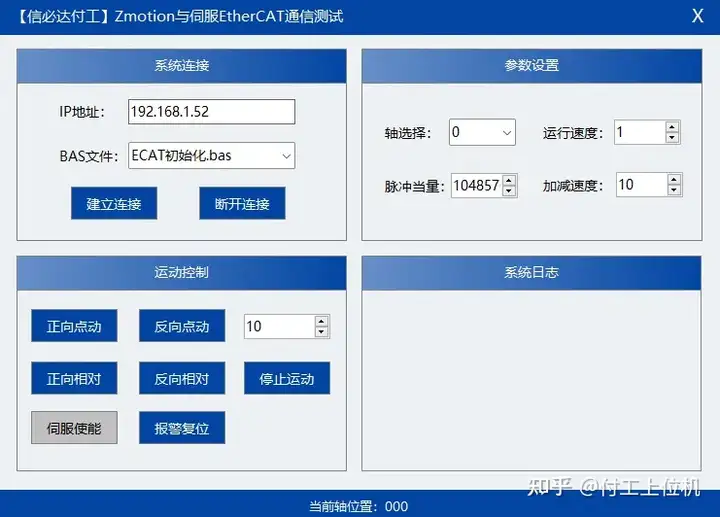
5、设置好IP地址,这个地方填写网卡的IP地址,然后点击建立连接,连接成功后再设置好相关的脉冲当量和速度,即可点动运行。
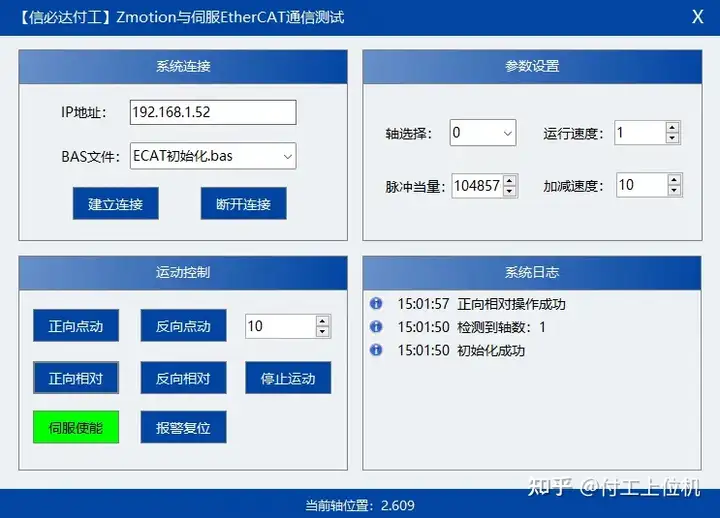
6、这个Demo的完整代码,在我的书籍第十章第10.3节有讲解。

标签:
相关文章
最新发布
- Nuxt.js 应用中的 prerender:routes 事件钩子详解
- 【问题解决】Tomcat由低于8版本升级到高版本使用Tomcat自带连接池报错无法找到表空间的问题
- 【FAQ】HarmonyOS SDK 闭源开放能力 —Vision Kit
- 六、Spring Boot集成Spring Security之前后分离认证流程最佳方案
- 《JVM第7课》堆区
- .NET 8 高性能跨平台图像处理库 ImageSharp
- 还在为慢速数据传输苦恼?Linux 零拷贝技术来帮你!
- 刚毕业,去做边缘业务,还有救吗?
- 如何避免 HttpClient 丢失请求头:通过 HttpRequestMessage 解决并优化
- 让性能提升56%的Vue3.5响应式重构之“版本计数”
点击排行
本站推荐
